![]()
领先的时空数据获取方案提供商与服务商

![]()
领先的时空数据获取方案提供商与服务商

[摘 要] 低空无人机航测是当前我国测绘领域的研究与应用热点。在概述无人机航测外业和内业数据处理流程的基础上,进行了基于无人机航测数据的1∶2000DLG数据快速生产实践。经精度检验,成果数据影像分辨率、平面位置精度能满足1∶2000测图需求,而高程采用无人机POS系统自动解算结果。最后针对植被茂密区的高程数据如何获取和去除树高以及无控制测图提出了自己的思考。本文为偏远的茂密森林区快速获取大比例尺测图数据提供了方法,也能够为无人机航测在其他领域的应用提供参考。
0 引言
传统的航空摄影测量,受空域申请、航摄周期等影响,在快速响应和小区域的精准测绘中无法满足快速更新的需求,低空无人机航测具有机动灵活、高效快速、作业成本低、生产周期短等优点,迅速成为了传统航测的有力补充。本文进行了基于无人机航测数据的1∶2000DLG数据快速生产实践,并对成果数据进行了精度检验,最后对实践中存在的问题提出了自己的思考。本文为偏远的茂密森林区快速获取测图数据提供了方法,也能够为无人机航测在其他领域的应用提供参考。
1 无人机航测外业和内业数据处理流程
1.1 无人机航测外业
(1)基本流程
无人机航测外业流程为:收集测区资料,对测区所处地理位置、地形地貌等进行评估,考虑周围是否有机场、军区等,是否需要报备和空域申请等;然后根据成果要求(如成果比例尺、地面分辨率大小等)和已有无人机航测设备,确定是否可以飞行;确定可以飞行后,在地面站软件进行航线规划,设置飞行高度、重叠度、起降场等,形成飞行计划,必要时可进行现场踏勘;进行像控点布设、采集,根据测区地形地貌,也可在飞行任务完成后进行像控点采集;将飞行计划上传至飞行控制系统,进行起飞、飞行、降落,采集影像数据、记录飞行的POS(Position Orientation System,简称POS)数据、获取飞行数据;地面监测系统显示无人机飞行航迹,地面工作人员据此监视无人机工作情况;飞行任务完成后,下载航测数据。基本流程如图1。

图1 无人机航测外业基本流程图
(2)航线规划
根据地面分辨率大小、相机CCD 大小、焦距,确定飞行航高;根据地形复杂程度,如高差大小,确定航向重叠度、旁向重叠度的大小,航向重叠度一般设置在80%以上,旁向重叠度设置在60%以上;根据飞机续航时间,划分飞行架次。
(3)像控点布设与测量
像控点布设一般采用区域网布点方案,布点个数根据测区地形调整。测量方式采用RTK测量。像片控制点中的平面控制点要求选在影像清晰的细小线状地物点、明显地物拐角点,高程控制点还要求高程起伏较小,选点困难地区,可考虑实地布设控制点。为了满足大比例测图需求,一般采用实地布设控制点。
1.2 内业数据处理
航飞数据获取后,采用内业数据处理软件如pix4Dmapper、ContextCapture等进行无人机数据处理,主要流程为:导入航飞的原始影像数据、POS数据,进行影像预处理,修正影像畸变和相机检校;自动进行连接点提取和自由网平差,进行影像相对定向;加入外业控制点,进行区域网平差、纠正,进行绝对定向;生成正射影像图(DOM)、数字表面模型(DSM)、点云、实景三维模型等数据;数字高程模型(DEM)、数字线划图(DLG)则要借助立体测图软件、地理信息系统(GIS)软件以及外业调绘等进一步生产。基本流程如图2。

图2 无人机内业数据处理流程图
2 无人机影像数据获取
2.1 工作区地理位置
工作区位于广东省阳山县南部太平镇的牛鼻岩地区,面积约13km2,地貌上属丘陵地带,为典型的喀斯特地貌,地形上左右两边为少量的平坦耕地,其余为喀斯特峰林,山山相连,植被覆盖茂密。
2.2 无人机数据获取
采用武汉纵横天地公司SKYLAND系列无人机的DF150型号无人机平台获取数据。该款无人机为旗舰型电动固定翼无人机,具有长航时、超纤薄的特点,翼展2m,续航时间150min,作业效率高,爬升速率高,起飞方式多样化,既可以采用弹射器起飞,也可以使用弹力绳起飞,采用伞降方式降落,最大限度保护相机,遥控器手动或半自动控制实现复杂区域精准降落,抗风力强,智能化操作,配备全画幅3640万像素索尼A7R相机,满足高分辨率需求。

根据工作区范围,实际飞行两个架次。受地形影响,像控点只布设在左右两边平坦地区,共计20个,采用合众思壮RTK进行测量。
3 1∶2000DLG数据生产
3.1 数据处理
采用Bentley公司的ContextCapture软件进行无人机数据处理,主要流程为:影像和POS导入→自动空三处理(相对定向)→相片刺点(绝对定向)→成果输出。这里的成果为DOM、DSM以及实景三维模型。DLG的生产则要进一步借助立体测图软件获取,采用DP-Moderler测图软件进行水系、居民地、交通等地理要素的采集,地理要素采集的详细程度以满足实际需求为原则。
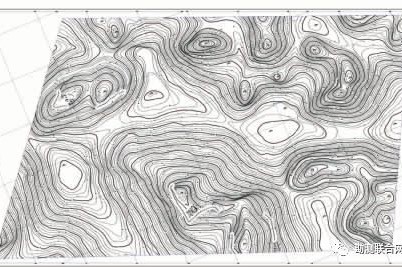
等高线的生成通过ArcGIS软件对DSM 去楼高、去树高后得到DEM,然后生成初始等高线,最后对初始等高线进行平滑、编辑、整理得到最终等高线,等高线的整饰按规范执行。
3.2 成果数据
工作区成果数据主要有正射影像DOM 数据、实景三维模型、数字线划图DLG 数据,图3为DOM 数据,图4为实景三维模型数据,图5为DLG数据。

图3 DOM 数据

图4 实景三维模型

图5 DLG(局部)
3.2.1 影像分辨率
《CH/T 9008.3-2010基础地理信息数字成果1∶500、1∶1000、1∶2000数字正射影像图》规范中要求1∶2000数字正射影像图影像地面分辨率应优于0.2m。根据计算,工作区生成的DOM分辨率为0.095m,满足规范要求。
3.2.2 平面位置精度
《CH/Z 3003-2010 低空数字航空摄影测量内业规范》中要求1∶2000数字线划图(B类)、数字正射影像图(B类)的地物点对附近野外控制点的平面位置中误差平地、丘陵地不应大于2.5m,山地、高山地不应大于3.75m。随机选取50个地物点,以工作区已有的高分辨率正射影像作为真实坐标来源(该数据平面位置精度优于0.5m),点位坐标差值统计见表1。

依据《GB/T24356-2009测绘成果质量检查与验收》,按同精度检测,地物点的点位中误差计算公式为式(1):

计算结果显示DOM 数据平面位置中误差为±2.13m,满足规范要求。
3.2.3 高程精度
由于工作区除左右两边为平坦地区,其余地区植被茂密,难以通行,且GPS信号差,因此未能采集到足够数量的高程控制点,高程采用无人机POS系统自动空三解算成果,精度未检验。
4 结束语
本文采用无人机航测获取影像数据,然后进行数据处理,快速获取了工作区DOM、DLG和实景三维模型。经精度检验,成果数据影像分辨率、平面位置精度能满足1∶2000测图需求,而高程方面,由于工作区植被茂密、难以通行,高程采用无人机POS系统自动解算结果。通过数据生产的实践,笔者有如下结论和探讨。
4.1 结论
(1)无人机航测优势明显
无人机航测影像获取快捷方便,无需专业航测设备,普通民用单反相机即可作为影像获取的传感器,操作手经过短期培训学习即可操控整个系统;成本相对低廉;飞行条件需求降低,不需要专门机场和跑道,可在普通公路上滑跑起降或采用弹射方式起飞和伞降方式降落;影像获取周期短、时效性强,从准备航飞到获取影像周期短,影像获取后可立即处理得到航测成果,时效性强;实践证明,成果能满足大比例尺成图要求。
(2)航测外业是数据来源,精度尤为重要,因此要做好精度控制航测外业数据精度受很多因素影响,为保证数据精度,实际飞行中要做好以下工作:摄影分区有无必要:对于高差起伏大、地物单一地区容易出现航摄漏洞,最好进行摄影分区,使分区内的高差满足航飞要求;漏洞补摄:漏洞补摄时最好采用前一次航摄飞行的数码相机,保证数据的一致性;航飞时间选择:综合考虑季节、天气、太阳高度角、阴影倍数等,选择合适的航飞时间;飞行质量控制:设置相机对焦、曝光时间,考虑飞机姿态稳定性,设置影像重叠度等,获取的影像要清晰、层次丰富、色调柔和;像控点布设:重点考虑布点方式、布点个数、采集精度等。
4.2 探讨
(1)如何更好地去除树高
DSM 数据是包含地面附着物高程信息的数据,要想得到DEM,就要去除地面附着物如建筑物、植被等的高程信息。对于植被稀疏区,可以采用点云分类的方法来解决这一问题,通过将点云进行分类得到地面点、建筑物、植被等类别,然后用地面点这一类别的点云构建DEM。而本文的工作区植被茂密,裸露点极少,通过点云分类的方法无法得到足够数量的地面点,因此不能构建DEM。本文采用减去平均树高的方法来去除树高,考虑到树高不一致,可以结合植被分类数据细化每一类的平均树高,从而得到较为准确的去除树高的DEM。
(2)无人机POS系统自动解算的高程数据精度问题
由于工作区受地形影响,未采集到足够数量的高程控制点,因此采用无人机POS系统自动解算的高程结果,这对于偏远的茂密森林植被区不失为一种快速获取高程数据的方法。随着无人机航测技术的发展,通过集成高精度的RTK、IMU系统以及改进数据处理算法,无控制点测图能满足大比例尺测绘生产的精度需求,届时将大大减少外业工作量,极大地提高无人机数据生产的时间和效益,也将更好地促进无人机航测的应用。
参考文献:略
声明:转载本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有。
武汉纵横天地航测与遥感业务覆盖自然资源、环境保护、农业、城市管理等政府机关,城市轨道交通、电力、水利等企事业单位,为规划设计、智慧城市、政府决策提供专业基础数据服务,为公司优势业务之一。从2013年至今完成了万余平方公里航测项目,能提供完善的航测内外业一体化解决方案,是行业领先空间数据采集获取方案解决商与提供商。
业务主要板块包括航空摄影测量、倾斜摄影测量、机载激光lidar,地面三维激光扫描, 优立全息(三维数据展示及管理)。
武汉纵横天地作为DJI大疆行业应用湖北省测绘行业授权服务商、济南赛尔无人机湖北省省级代理商,拥有成熟稳定的测绘无人机行业解决方案,为您提供优质的无人机测绘系列产品销售、解决方案及技术培训服务!
同时,作为UTC慧飞湖北武汉东湖高新分校,提供专业的无人机测绘技术、航拍技术、植保技术线下培训,欢迎致电~咨询热线:400-8766196

免责声明:部分文章信息来源于网络以及网友投稿,本网站只负责对文章进行整理、排版、编辑,是出于传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性,如本站文章和转稿涉及版权等问题,请作者及时联系本站,我们会尽快和您对接处理。
官方所有内容、图片如未经过授权,禁止任何形式的采集、镜像,否则后果自负!
11月2日,武汉纵横天地与湖北国土资源职业学院校企合作签约暨授牌仪式在我司顺利举行。公司总经理李斌与测绘地理信息学院院长马啸、王淑璇老师出席了此次仪式。
时间:2020-05-16为准确获取具体地块利用现状、权属范围等信息,采用无人机航测快速获取航片并生成高分辨率正射影像,进而开展影像解译的方式已经日趋成熟。但在勘测范围大、工期紧张、人员紧缺的情况下,湖北大疆无人机单机航测作业模式已经不能满足生产需求。这意味着,采用「一控多机」的方式开展航测显得尤为迫切。
时间:2020-07-313月26日,由湖北省测绘行业协会与武汉纵横天地空间信息技术有限公司(以下简称:武汉纵横天地)联合主办的“把握大疆小趋势,拥抱行业大未来”大疆无人机测绘行业推介会(以下简称:大会)在武汉顺利召开。
时间:2020-05-205月23日,“匠心育人,高职榜样——2018年第二届全国主流融媒体湖北特色高职行”采访团走进湖北城市建设职业技术学院。来自全国的40家主流融媒体记者共同探索该校工程测量技术专业的独特教学理念。
时间:2020-05-208月20日,在集团公司的大力支持下,由工勘院主办的“创新四院杯”无人机技术交流活动在湖北浠水召。武汉纵横天地空间信息技术有限公司、武汉市毫米科技工程有限公司、武汉胜图科技有限公司等7家单位参与了此次活动,武汉大学测绘学院邓非教授莅临现场进行了专题讲座。
时间:2020-05-20在5月23日召开的第八届卫星导航学术年会上,北京合众思壮科技股份有限公司发布了中国首款四通道GNSS宽带射频芯片,代号“天鹰”。
时间:2020-05-20日前,由武汉纵横天地空间信息技术有限公司(以下简称武汉纵横天地)主办的空地一体化多数据融合新产品新技术交流会如约而至。
时间:2020-05-20近日,武汉纵横天地空间信息技术有限公司(以下简称武汉纵横天地)与武汉铁路职业技术学院签约仪式在我司举行。董事长陈磊,武汉铁道工程学院副院长李永贵以及学院全体专任老师出席了签约仪式。
时间:2020-05-20